∆p
BILANCIAMENTO STATICO - BILANCIAMENTO DINAMICO
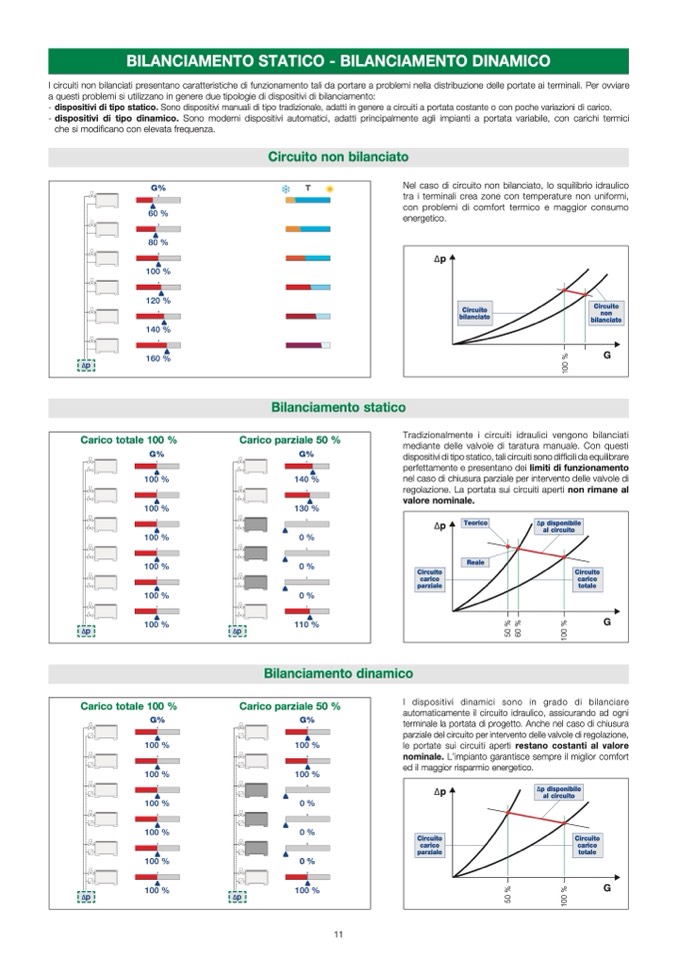
I circuiti non bilanciati presentano caratteristiche di funzionamento tali da portare a problemi nella distribuzione delle portate ai terminali. Per ovviare
a questi problemi si utilizzano in genere due tipologie di dispositivi di bilanciamento:
- dispositivi di tipo statico. Sono dispositivi manuali di tipo tradizionale, adatti in genere a circuiti a portata costante o con poche variazioni di carico.
- dispositivi di tipo dinamico. Sono moderni dispositivi automatici, adatti principalmente agli impianti a portata variabile, con carichi termici
che si modi
ficano con elevata frequenza.
160 %
140 %
G%
G%
160 %
Tradizionalmente i circuiti idraulici vengono bilanciati
mediante delle valvole di taratura manuale. Con questi
dispositivi di tipo statico, tali circuiti sono difficili da equilibrare
perfettamente e presentano dei limiti di funzionamento
nel caso di chiusura parziale per intervento delle valvole di
regolazione. La portata sui circuiti aperti non rimane al
valore nominale.
G%
100 %
G%
110 %
G
I dispositivi dinamici sono in grado di bilanciare
automaticamente il circuito idraulico, assicurando ad ogni
terminale la portata di progetto. Anche nel caso di chiusura
parziale del circuito per intervento delle valvole di regolazione,
le portate sui circuiti aperti restano costanti al valore
∆p
nominale. L’impianto garantisce sempre il miglior comfort
ed il maggior risparmio energetico.
11
Nel caso di circuito non bilanciato, lo squilibrio idraulico
tra i terminali crea zone con temperature non uniformi,
con problemi di comfort termico e maggior consumo
energetico.
∆
p
Circuito non bilanciato
G
5
0
%
0
0
%
∆p
G%
❄
T
✹
60 %
G%
❄
T
✹
60 %
80 %
G%
❄
T
✹
100 %
80 %
60 %
100 %
120 %
80 %
120 %
140 %
100 %
140 %
160 %
120 %
∆p
G
Circuito
bilanciato
1
0
0
%
Circuito
non
bilanciato
Bilanciamento statico
Carico totale 100 %
100 %
G%
100 %
100 %
G%
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
∆p
100 %
100 %
Carico parziale 50 %
140 %
G%
∆p
140 %
130 %
G%
130 %
0 %
140 %
0%
0 %
130 %
0%
0 %
0 %
110 %
0%
0 %
110 %
0 %
∆p disponibile
al circuito
∆p
∆p
Circuito
carico
parziale
Teorico
Reale
Circuito
carico
totale
G
5
0
%
6
0
%
1
0
0
%
100 %
Bilanc
10
i
0
a
%
mento dinamico
G%
G%
5
0
6
0
1
0
0
%
%
%
1
Carico totale11000%%
100 %
G%
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
100 %
Carico parz1ia00le%50 %
100 %
G%
100 %
0 %
100 %
0%
0 %
100 %
0%
0%
0 %
100 %
0%
0 %
100 %
0%
∆p
100 %
∆p
100 %
∆p disponibile
al circuito
∆p
Circuito
carico
parziale
Circuito
carico
totale
G
G
5
0
%
5
0
%
1
0
0
%
1
0
0
%

